Comme son nom l’indique le projet interdisciplinaire inclut une autre discipline : les sciences physiques. Le projet se réalise sur l’année de terminale, en équipe de 3 ou 4 élèves.
Le projet interdisciplinaire consiste à choisir un contexte sociétal (la santé, le sport, le transport, etc…) afin d’y repérer un besoin. Celui-ci est décrit par un cahier des charges qui devient un document contractuel que l’équipe devra respecter. S’ensuit une phase de recherche afin de connaître l’état de l’art dans le domaine, puis d’imaginer des solutions constructives, répondant au cahier des charges. Ces solutions sont alors modélisées afin de pouvoir choisir la solution qui sera réalisée. Un prototype du système est fabriqué afin de pouvoir y réaliser des mesures et ainsi, caractériser d’éventuels écarts entre l’attendu, le modèle et le mesuré.
Pour réaliser ce projet, l’élève dispose de 48h intégrées au temps scolaire ainsi que d’un budget. On peut choisir d’améliorer un système existant ou en concevoir un entièrement ou encore se focaliser sur une partie d’un système complexe. De même, le prototype peut être fabriqué entièrement ou partiellement.
Le projet interdisciplinaire est un cadre permettant à chaque élève d’exprimer toute la créativité et la rigueur dont peut faire preuve un ingénieur.
Afin d’illustrer l’étendue des possibilités, voici quelques « captures » de projets réalisés par les terminales du lycée Kléber :
Session 2019
Quelques-uns des projets réalisés cette année :
- Deux ruches instrumentées et communicantes qui permettront à l’apiculteur de savoir lorsqu’il faut récolter le miel et lorsqu’il y a un essaimage, et qui assisteront les abeilles dans la régulation de la température et de l’humidité de la ruche.
- Une serre autonome qui assistera le jardinier dans le maintien d’une humidité et d’une température optimale
- Un aquarium d’aquaculture autonome qui permettra de réguler les conditions de pH et de température de l’eau
- Un support de valise mis à disposition par les gares et/ou les aéroports. Le support est capable de suivre de façon autonome, le propriétaire de la valise lors de ses déplacements dans la gare ou l’aéroport.
- Un robot d’exploration. Pilotable à distance, il est capable de filmer son environnement, de détecter des obstacles et de sauter par-dessus.
Les étudiants de ce projet se sont inscrits au concours « Les Olympiades des Sciences de l’Ingénieur »
- Un ventilateur asservi capable de s’orienter automatiquement vers la personne et de moduler la vitesse de ses hélices de façon autonome.
- Une crêpière automatique capable de produire des crêpes à la chaîne.
- Un système de remplissage de verre automatique capable de remplir des verres à la chaîne avec un cocktail prédéfini.
- Un système permettant d’effacer automatiquement les tableaux
- Une porte automatique pour le particulier capable de reconnaître les personnes autorisées.
- Une main robotisée (uniquement la pince pouce-index) capable de reproduire le mouvement d’une personne.

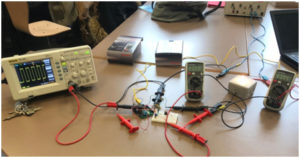
Pilotage est caractérisation de la réponse d’un servo-moteur.

Modélisation 3D d’une crêpière automatisée
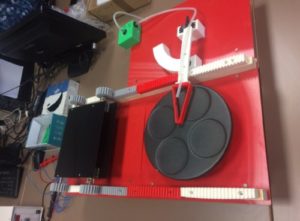
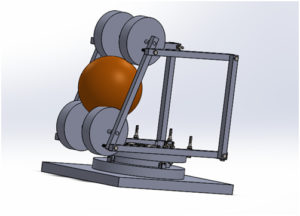
Modélisation d’un système de compression de ressort par came.

Fabrication du châssis de la ruche connectée

Fabrication du dormant de la porte RFID

Prototype de l’effaceur automatique de tableau

Prototype de la porte RFID

Prototype du robot d’exploration
Prototype de la crêpière automatique
Session 2018
Pour cette session, les élèves sont encore sur les anciens programmes et disposent de 70h de projet.
Quelques-uns des projets réalisés cette année :
- Une machine à cocktail
- Un robot d’entrainement au basket
- Un robot nettoyeur de bureau
- Une voiture (jouet pour enfant) pilotée par smartphone
- Un drone suiveur capable de nous filmer dans nos activités
- Une éolienne pour camping-car
- Un fauteuil roulant à élévation permettant à l’utilisateur d’atteindre des objets en hauteur
- Un robot mobile, distributeur de journaux
- Une poubelle de tri automatique pour le particulier
- Un système de gestion automatique de l’éclairage d’une salle de classe
- Un casque à vélo intégrant un airbag

Conception d’un modèle 3D.

Impression 3D du modèle conçu.
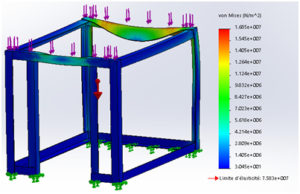
Etude de résistance d’une structure en cornière.
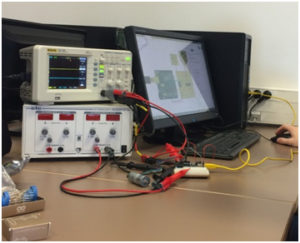
Pilotage d’un circuit puissance par une carte Arduino programmée, avec modulation par largeur d’impulsion.
Etude dynamique d’un lanceur de balle.
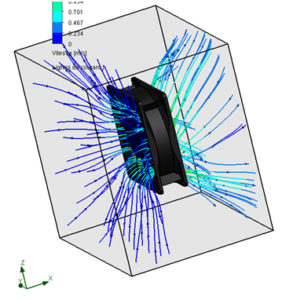
Analyse des flux d’air d’un ventilateur d’aspiration.
Programmation d’une carte Arduino afin de piloter un moteur puis relevé du signal du codeur (capteur) sur l’oscilloscope.

Modélisation 3D du drone

Fabrication.
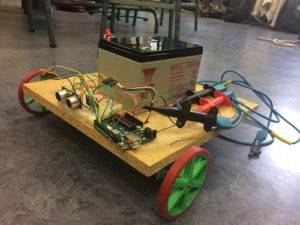
Robot distributeur de journaux. Phase de test de la fonction « détection d’obstacles ».

Système d’adaptation de la hauteur de l’assise d’un fauteuil roulant au mobilier.
Banc de test permettant de mesure la portance de l’hélice
D’autres illustrations à venir…